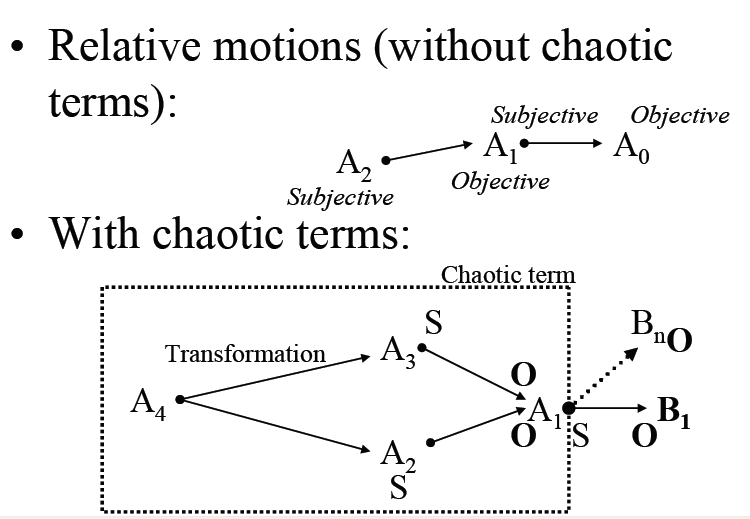
Whatˇ¦s Chaotic Terms:
- Chaotic relative motions are generated by the dynamic structure based on more complicated multiple-level coordinate systems.
- The structure of relative motion with chaotic terms influences the change of the shape of geometric forms very much.
Concept of Chaotic Terms
Chaotic terms for different relative motions and manipulations
Motion Type |
Manipulations Terms |
Implemental Rules |
Orbital |
CoordAngle |
|
CoordTarget |
|
|
CoordRadius |
|
|
Polygonal |
SideNum |
|
Wheelbase Relative Motion |
WheelSpeed |
|
Pursuit |
PursuitTarget |
|
PursuitSpeed |
|
|
Weight |
None |
None |